Shoudong Huang
Professor
Robotics Institute, University of Technology Sydney

Room 305, Level 9, Building 11
81-113 Broadway
Ultimo, NSW 2007, Australia
I am a Professor in the School of Mechanical and Mechatronic Engineering at UTS and an internationally recognised researcher whose work focuses on robot navigation in many different areas, including search and rescue, underwater, underground mining, and surgery.
I am motivated by a desire to see robots collaborating with humans and helping people in their daily lives, and my work has made significant contributions to the fields of robot simultaneous localisation and mapping, operations research, nonlinear state estimation, and nonlinear robust control.
I have published more than 200 research papers and was named one of the 100 Most Influential Scholars in the field of Robotics by Research Profiler Aminer in 2018.
Since 2007, as a Chief Investigator, I have secured external research funding worth more than $4 million, including three ARC Discovery grants, three ARC Linkage grants, and one NHMRC Ideas grant.
UTS Profile /Email / Google Scholar
Editorial Roles
-
Associate Editor: International Journal of Robotics Research (2024-2025), IEEE Transactions on Robotics (2019-2022)
-
Registration Chair: Robotics: Science and Systems 2023
-
Publication Chair: Robotics: Science and Systems 2022
-
Editor: IEEE/RSJ International Conference on Intelligent Robots and Systems (2020-2022)
News
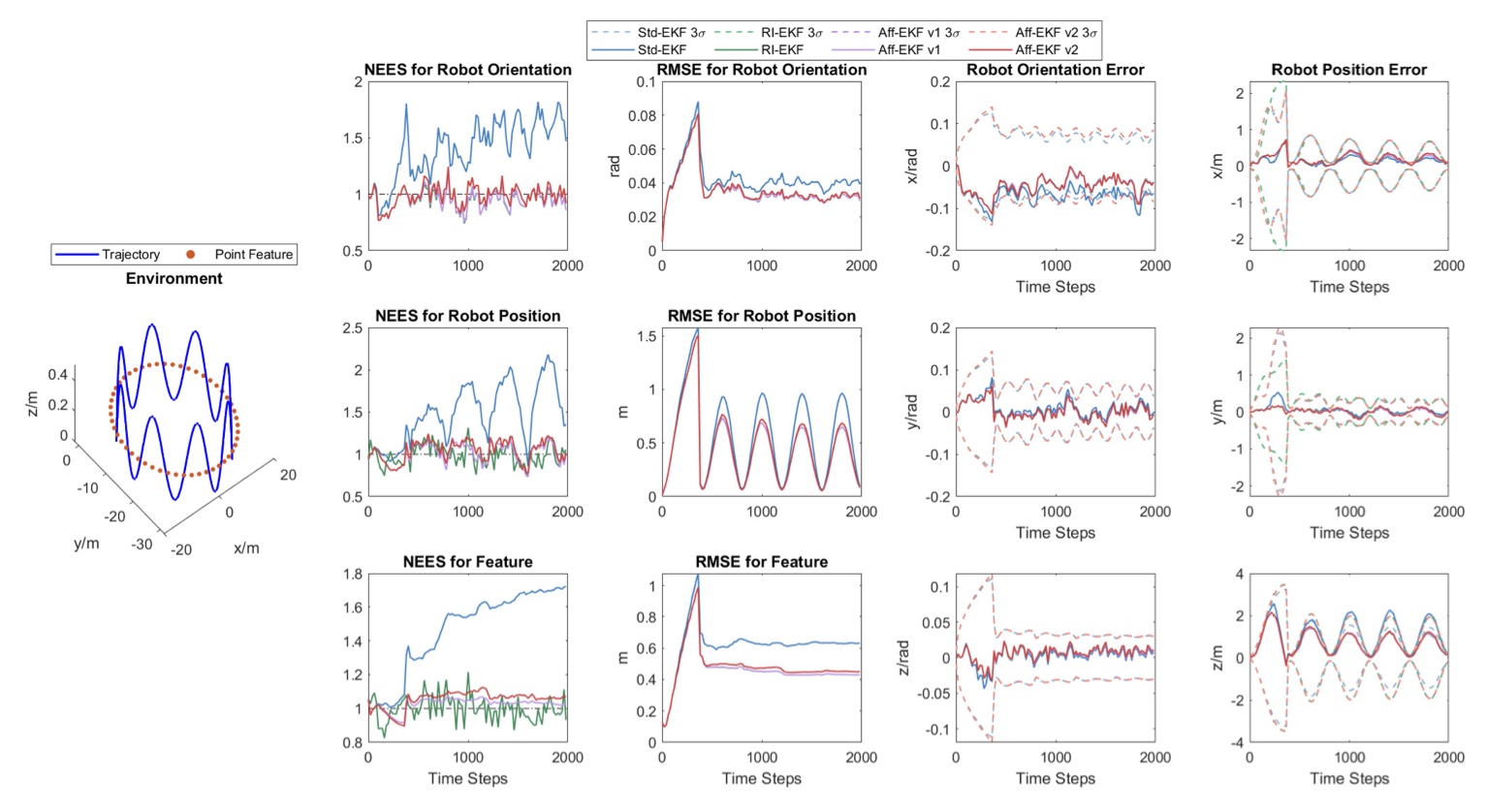
| Dec 11, 2025 | Our paper, Affine EKF, has been accepted by T-RO! Congrats to @Yang Song. Check out the paper here and code here. |
|---|---|
| Jul 06, 2025 | We are excited to announce that we will host the Robotics: Science and Systems (RSS) 2026 conference! Watch the welcome video here. |
| Jun 16, 2025 | We have 4 contributed papers accepted by IROS 2025. Congratulations to @Yiran, Kai, Isira, Roy, Tiancheng, and Yingyu. Very good job! |
| May 02, 2025 | Our paper Occupancy-SLAM has been accepted by T-RO! Congrats to @Yingyu Wang. Check out the open-source code here and read the full paper here. |
| Jan 29, 2025 | Our paper Partial-to-Full Registration based on Gradient-SDF for Computer-Assisted Orthopedic Surgery has been accepted by ICRA 2025. Congratulations to @Tiancheng Li. |